Progress on our HSM
Happy thanksgiving! We begin the day at midnight when Jake created a milestone for the FSM. After a couple hours of testing, he created a FSM that allows the robot to successfully find the tape by going straight at it, aligning itself with the tape, and then following the tape by rapidly swerveling back in forth on the line but still going straight. Later today Luis and Edmond worked on the next parts of getting ammo, finding and aligning to the T. We both decided that they should be in their own sub level FSMs to simplify the HSM.
So far today, we programmed the robot to be able to wall ride by bumping it until it finds tape, while fixing holes in the logic to make our implementation more robust. We are going to program the robot to turn slight enough to be able to consistently stop at the vertical portion of the T tape. From there, Edmond's plan for aligning is to swivel back to go in front of the T, then turn to align all five of its sensors with the tape. When this happens, the robot is directly in front of the ammo depot and shall go straight to push the ammo deposit to get ammo. When the PWM frequency of the motors is low enough, it is possible to fine tune the motor speeds to turn the way we want.
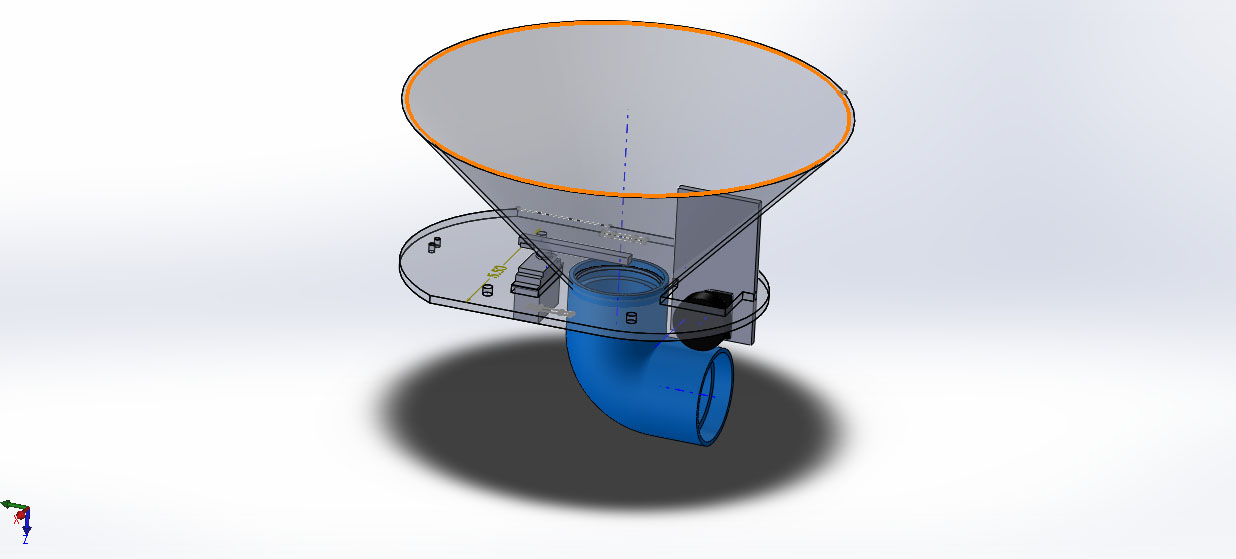
Aaron continued designing the plunger and ball launcher mechanism. He created CAD model of a servo actuator that lets the balls in, and a DC motor that propels the balls out of the funnel.