Finite State Machine Design
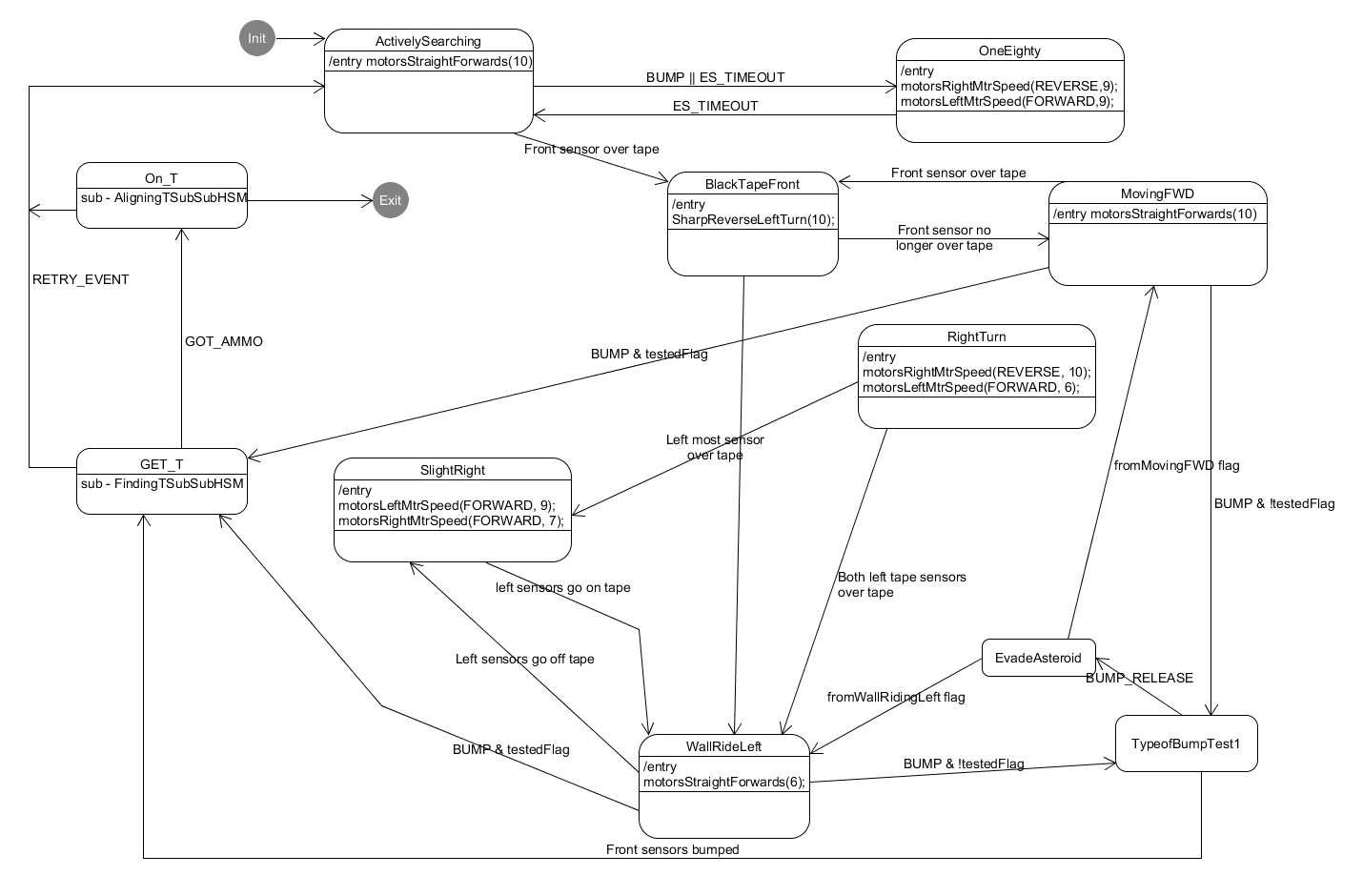
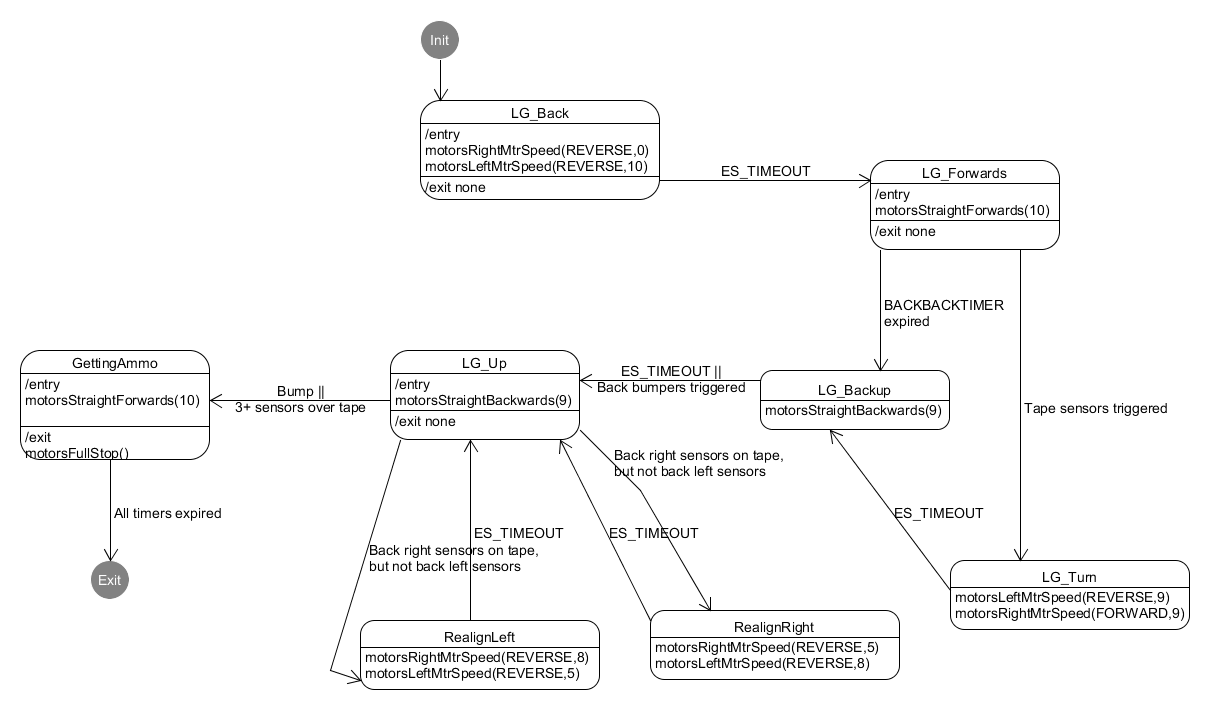
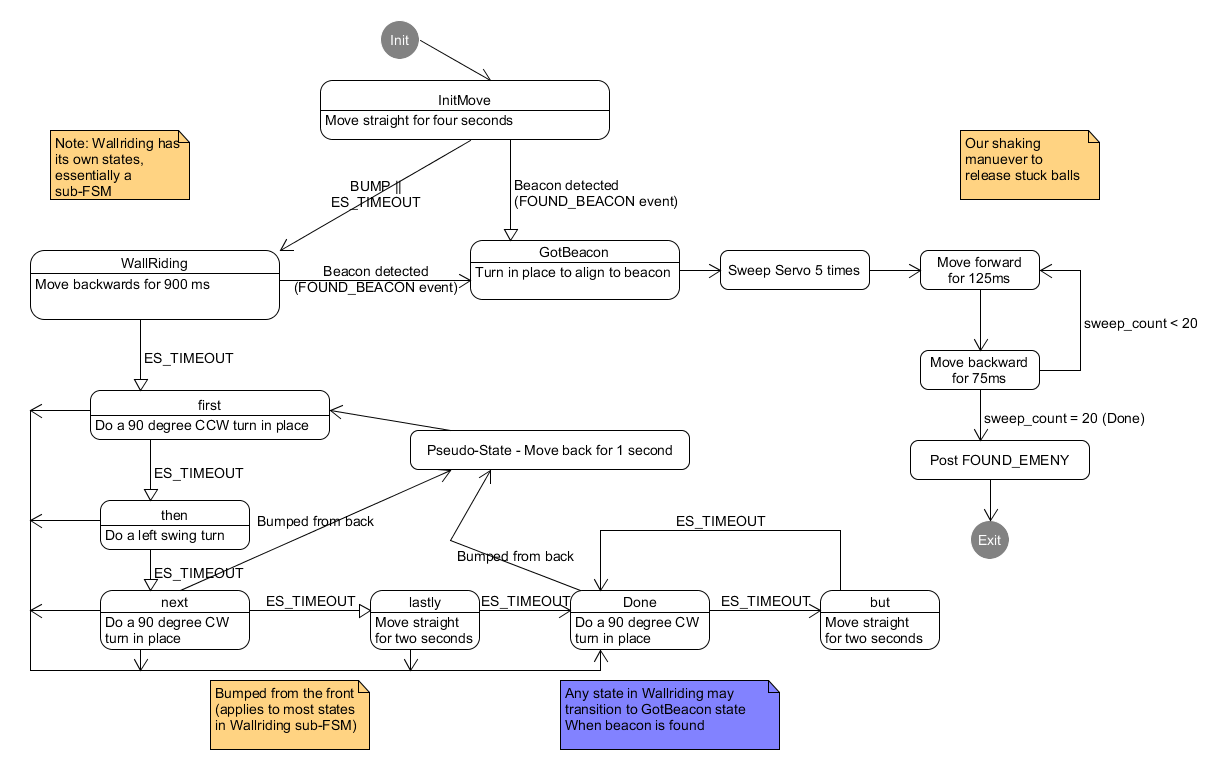
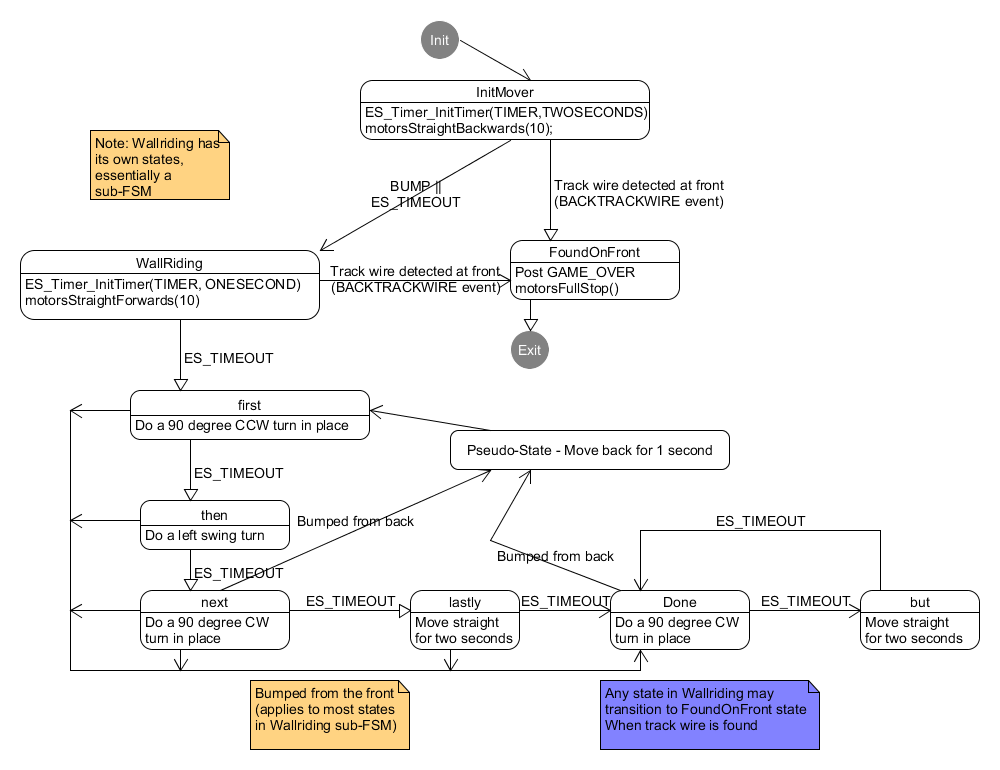
We designed and implemented finite state machines to allow robust behaviour of our robot. Our FSM is hierarchial and currently three levels deep. Navigation in the finding enemy and portal states is implemented in its own state machine in the respective FSMs instead of in its own level.